Camera Frame Access Sample
The Camera Frame Access feature is marked as experimental because it is not supporting all public AR Foundation APIs fully and optimizations on the package and Snapdragon Spaces Service side are breaking backwards compatibility from release to release at the moment.
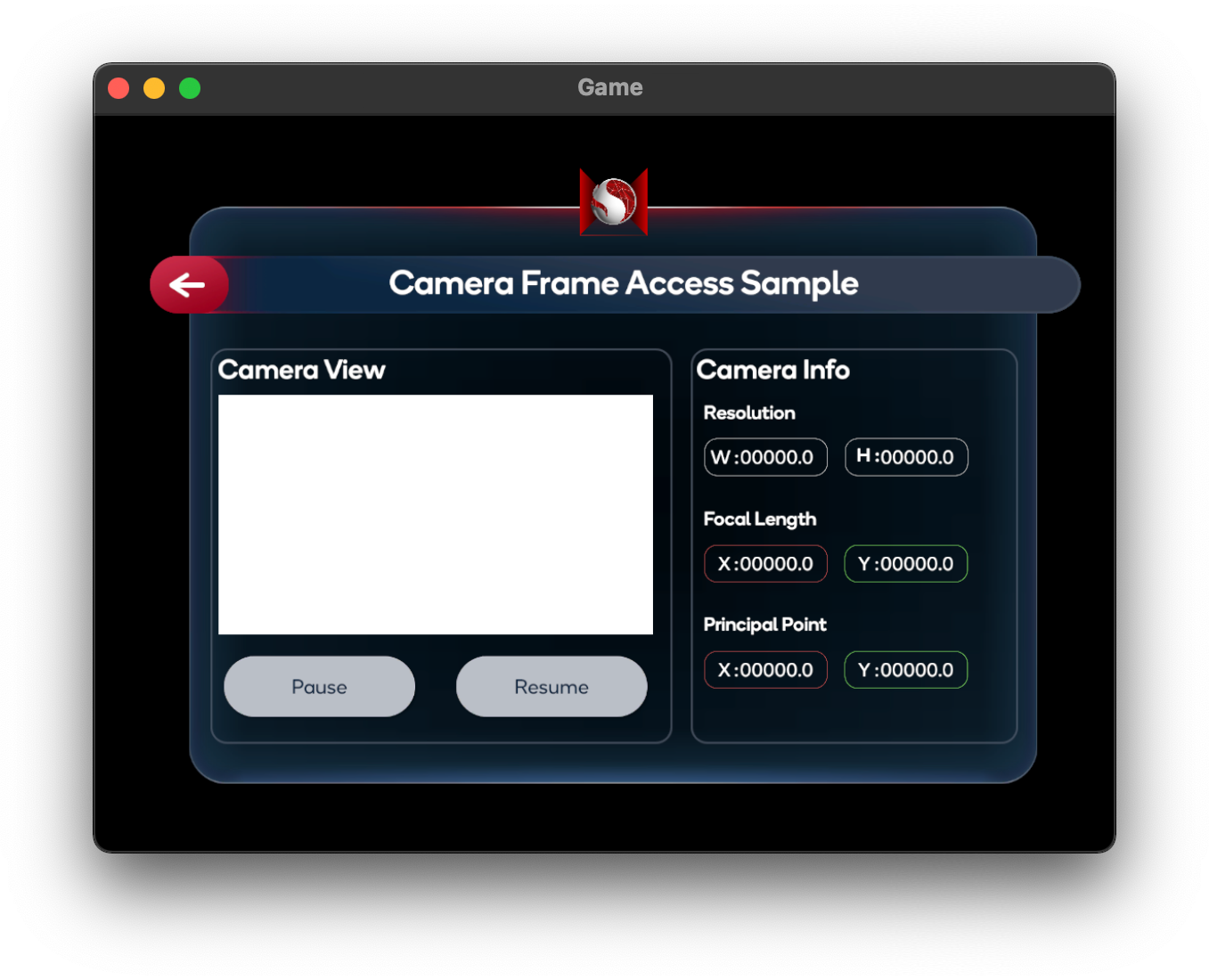
This sample demonstrates how to retrieve RGB camera frames and intrinsic properties for image processing.
For basic information about camera frame access and what AR Foundation's AR Camera Manager component does, please refer to the Unity documentation.
In order to use this feature it has to be enabled in the OpenXR plugin settings located under Project Settings > XR Plug-in Management > OpenXR (> Android Tab).
How the sample works
Adding the AR Camera Manager component to the AR Session Origin > AR Camera GameObject will enable the camera access subsystem. Upon starting, the subsystem will retrieve valid sensor configurations from the viewer device. If a valid Y'UV420sp`` or YUY2` sensor configuration is found, the subsystem will select this configuration as the provider for CPU camera images. Conceptually, an AR Camera Manager represents a single camera and will not manage multiple sensors at the same time.
The sample scene consists of two panels:
- A camera feed panel displaying the latest CPU image from the device camera, with Pause and Resume buttons
- A camera info panel enumerating the various properties of the device camera
Retrieving CPU images
Each time a new camera frame is available to the subsystem, the AR Camera Manager will fire a frameReceived event. Subscribing to this event allows other scripts to retrieve the latest camera frame at the earliest time possible and perform operations on it. Once a camera frame is available, the camera manager's TryAcquireLatestCpuImage function will return an XRCpuImage object which represents a single, raw image from the selected device camera. The raw pixel data of this image can be extracted with XRCpuImage's Convert function, which returns a NativeArray<byte>. Snapdragon Spaces does not support asynchronous conversion of frames through XRCpuImage.ConvertAsync.
An AR Camera Manager component is automatically added to the scene hierarchy when creating an AR Session Origin. Camera frames are requested from Snapdragon Spaces Services while an AR Camera Manager component is enabled. Consider disabling this component if you do not require Camera Frame Access in your scene.
An AR Camera Background component is automatically added to the scene hierarchy when creating an AR Session Origin, which Snapdragon Spaces does not support from version 0.20.0. This component must be disabled to avoid rendering issues mentioned in the known issues section.
XRCpuImage objects must be explicitly disposed of after conversion. To do this, use XRCpuImage's Dispose function. Failing to dispose of XRCpuImage objects may leak memory until the camera access subsystem is destroyed.
If allocating a NativeArray<byte> before conversion, this buffer must also be disposed of after copy or manipulation. To do this, use NativeArray<T>'s Dispose function. Failing to dispose of NativeArray<byte> will leak memory until the camera access subsystem is destroyed.
For detailed information about how to use frameReceived, TryAcquireLatestCpuImage and XRCpuImage, please refer to the Unity documentation.
Camera Frame Access may need a few seconds to initialize depending on the used device. Do not try to access frames before the subsystem has initialized successfully. It is highly recommended to use the frameReceived event from the AR Foundation API to avoid errors.
The sample code below requests a CPU image from the AR Camera Manager when the frameReceived event is fired. If successful, it extracts the XRCpuImage's raw pixel data directly into a managed Texture2D's GetRawTextureData<byte> buffer, applying the texture buffer afterwards with the Apply function. Finally, it updates the texture in the target RawImage, making the new frame visible in the application's UI.
public RawImage CameraRawImage;
private ARCameraManager _cameraManager;
private Texture2D _cameraTexture;
private XRCpuImage _lastCpuImage;
public void Start()
{
_cameraManager.frameReceived += OnFrameReceived;
}
private void OnFrameReceived(ARCameraFrameEventArgs args)
{
_lastCpuImage = new XRCpuImage();
if (!_cameraManager.TryAcquireLatestCpuImage(out _lastCpuImage))
{
return;
}
UpdateCameraTexture(_lastCpuImage);
}
private unsafe void UpdateCameraTexture(XRCpuImage image)
{
var format = TextureFormat.RGBA32;
if (_cameraTexture == null || _cameraTexture.width != image.width || _cameraTexture.height != image.height)
{
_cameraTexture = new Texture2D(image.width, image.height, format, false);
}
var conversionParams = new XRCpuImage.ConversionParams(image, format);
var rawTextureData = _cameraTexture.GetRawTextureData<byte>();
try
{
image.Convert(conversionParams, new IntPtr(rawTextureData.GetUnsafePtr()), rawTextureData.Length);
}
finally
{
image.Dispose();
}
_cameraTexture.Apply();
CameraRawImage.texture = _cameraTexture;
}
The following texture formats are supported by the AR Camera Manager:
RGB24RGBA32BGRA32
Retrieving YUV plane data
Snapdragon Spaces currently supports the Y′UV420sp and YUY2 formats. Y'UV420sp consists of a Y buffer followed by interleaved 2x2 subsampled U/V buffer. YUY2 consists of a single buffer interleaving Y and U/V samples in the form of Y-U-Y-V 'macropixels', each representing 2 horizontal pixels with equal chrominance, with no vertical subsampling. For detailed information about the YUV color model, please refer to the YUV section of the YCbCr Wikipedia article.
If RGB conversion is not needed, the raw YUV plane data can be retrieved through XRCpuImage's GetPlane function. This returns an XRCpuImage.Plane object from which plane data can be read. Formats can be differentiated with XRCpuImage.planeCount, indicating the amount of planes representing the frame.
Y'UV420sp
- Y plane data has index 0 and can be accessed via
GetPlane(0) - UV plane data has index 1 and can be accessed via
GetPlane(1)
YUY2
- YUYV plane data has index 0 and can be accessed via
GetPlane(0)
In case multiple applications are accessing the same sensor simultaneously, they may see a YUY2 frame format where they normally would see a Y'UV420sp frame format. It is recommended to handle both cases in your application. Not doing so might cause issues when using video capture or streaming services.
For detailed information about XRCpuImage.GetPlane, please refer to the Unity documentation.
For detailed information about XRCpuImage.Plane, please refer to the Unity documentation.
The sample code below requests a CPU image from the AR Camera Manager when the frameReceived event is fired. If successful, it retrieves the XRCpuImage's raw plane data to apply different image processing algorithms to it depending on the YUV format.
private ARCameraManager _cameraManager;
private XRCpuImage _lastCpuImage;
public void Start()
{
_cameraManager.frameReceived += OnFrameReceived;
}
private void OnFrameReceived(ARCameraFrameEventArgs args)
{
_lastCpuImage = new XRCpuImage();
if (!_cameraManager.TryAcquireLatestCpuImage(out _lastCpuImage))
{
return;
}
switch(_lastCpuImage.planeCount)
{
case 1:
ProcessYuy2Image(_lastCpuImage);
break;
case 2:
ProcessYuv420Image(_lastCpuImage);
break;
}
}
private void ProcessYuv420Image(XRCpuImage image)
{
var yPlane = image.GetPlane(0);
var uvPlane = image.GetPlane(1);
for (int row = 0; row < image.height; row++)
{
for (int col = 0; col < image.width; col++)
{
// Perform image processing here...
}
}
}
Retrieving Sensor Intrinsics
The camera manager's TryGetIntrinsics function will return an XRCameraIntrinsics object which describes the physical characteristics of the selected sensor. For detailed information about XRCameraIntrinsics, please refer to the Unity documentation.
The sample code below retrieves the intrinsics of the selected sensor and displays it in the application UI.
public Text[] ResolutionTexts;
public Text[] FocalLengthTexts;
public Text[] PrincipalPointTexts;
private ARCameraManager _cameraManager;
private XRCameraIntrinsics _intrinsics;
private void UpdateCameraIntrinsics()
{
if (!_cameraManager.TryGetIntrinsics(out _intrinsics))
{
Debug.LogWarning("Failed to acquire camera intrinsics.");
return;
}
ResolutionTexts[0].text = _intrinsics.resolution.x.ToString();
ResolutionTexts[1].text = _intrinsics.resolution.y.ToString();
FocalLengthTexts[0].text = _intrinsics.focalLength.x.ToString("#0.00");
FocalLengthTexts[1].text = _intrinsics.focalLength.y.ToString("#0.00");
PrincipalPointTexts[0].text = _intrinsics.principalPoint.x.ToString("#0.00");
PrincipalPointTexts[1].text = _intrinsics.principalPoint.y.ToString("#0.00");
}
Retrieving Sensor Extrinsics
The AR Foundation API does not expose sensor extrinsics. Instead, two methods are provided to get the sensor extrinsics.
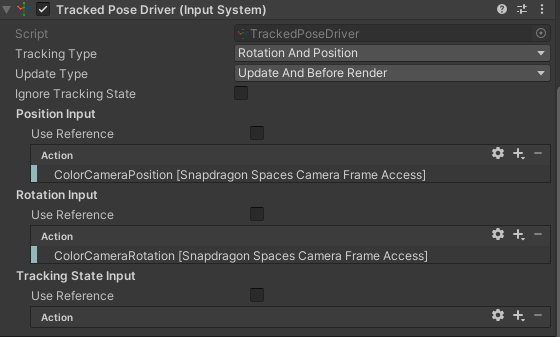
Method 1: Snapdragon Spaces Input Bindings
Snapdragon Spaces provides input actions for ColorCameraPosition and ColorCameraRotation. These input actions can be used with a Tracked Pose Driver (Input System) by binding them with the Position Input and Rotation Input. This Tracked Pose Driver (Input System) can be added to a GameObject and the pose of this GameObject will match the color camera extrinsics pose.
As the Tracked Pose Driver (Input System) component relies on the update timing of the underlying Input System, the transform of the associated GameObject might be outdated by one frame when requested.
If minimal latency is required or if your system has low error tolerance, position and rotation can instead be retrieved with TrackedInputDriver.positionAction.ReadValue<Vector3>() and TrackedInputDriver.rotationAction.ReadValue<Quaternion>() respectively.
The following image shows how to use these input bindings.
Method 2: Snapdragon Spaces Camera Pose Provider
Add the Spaces Camera Pose Provider component to the scene and use the GetPoseFromProvider function to retrieve the camera pose associated with the AR Camera Manager's latest frameReceived event. The provided pose is relative to the AR Session's coordinate system.
The sample code below retrieves the extrinsics of the selected sensor and displays it in the application UI.
public SpacesCameraPoseProvider PoseProvider;
public Text[] ExtrinsicPositionTexts;
public Text[] ExtrinsicOrientationTexts;
private Pose _extrinsics;
private void UpdateCameraExtrinsics()
{
if (PoseProvider.GetPoseFromProvider(out _extrinsics) == PoseDataFlags.NoData)
{
Debug.LogWarning("Failed to acquire camera extrinsics.");
return;
}
var position = _extrinsics.position;
var orientation = _extrinsics.rotation.eulerAngles;
ExtrinsicPositionTexts[0].text = position.x.ToString();
ExtrinsicPositionTexts[1].text = position.y.ToString();
ExtrinsicPositionTexts[2].text = position.z.ToString();
ExtrinsicOrientationTexts[0].text = orientation.x.ToString();
ExtrinsicOrientationTexts[1].text = orientation.y.ToString();
ExtrinsicOrientationTexts[2].text = orientation.z.ToString();
}
Spaces Camera Pose Provider can also be used as a pose provider for a Tracked Pose Driver.
Tips to Increase Performance
Camera Access operations can be computationally expensive, whether due to a large image resolution or the nature of the algorithms used.
- When converting the image with
XRCpuImage.Convert, provideXRCpuImage.ConversionParamswith smalleroutputDimensions. - When processing the image with
XRCpuImage.GetPlane, consider subsampling the data buffers with a common factor.
Snapdragon Spaces offers a Direct Memory Access Conversion setting, which changes the way XRCpuImage.Convert reads and writes data. By default, Snapdragon Spaces moves frame data using Marshal.Copy. Enabling this setting allows Spaces to use NativeArray<byte> direct representations of the source and target buffers instead. This setting can be found in Project Settings > XR Plug-in Management > OpenXR (> Android Tab) > Snapdragon Spaces > Camera Frame Access (Experimental) > Direct Memory Access Conversion. Enabling this setting may improve performance on certain devices, though it may negatively impact performance on other architectures. Below is a table indicating which devices the Direct Memory Access Conversion setting is recommended for:
| Device | Recommendation |
|---|---|
| Lenovo ThinkReality A3 | Improves performance, recommended |
| Lenovo ThinkReality VRX | Lowers performance, not recommended |
Spaces AR Camera Manager Config's MaximumVerticalResolution and DownsamplingStride properties have been deprecated in version 0.21.0, use XRCpuImage.ConversionParams with smaller outputDimensions or XRCpuImage.GetPlane with a custom downsampling factor instead.
Retrieving Additional Sensor Data
The Spaces AR Camera Manager Config exposes the number of camera sensors in the device using the GetActiveCameraCount method. This information could be relevant for differentiating between dual devices and VR devices, and for appropriately handling the camera image.